Hi,
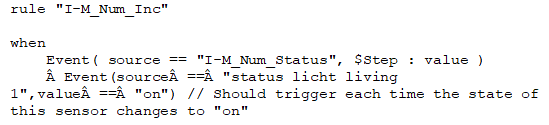
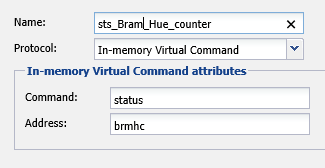
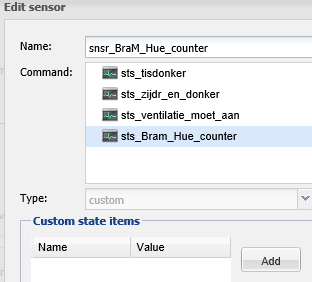
I finally was able to take some time. I implemented the rule from your example, mapped to my status command and sensor. The logic is indeed what I expect it to do. When syncin the controller the boot log is ok. No errors there anymore. So syntax seems to be ok. I have added the sensor to my UI so I can see what happens.
But whenever I try to trigger it there is a huge error in the drools log. See below. What could be the problem here?
I hope it is not some java version error, because I did quit some effort to get to the version I am on now, for some other problems.
I have the following packages in the top;
package org.openremote.controller.protocol
//package org.openremote.controller.model.event
global org.openremote.controller.statuscache.CommandFacade execute;
global org.openremote.controller.statuscache.SwitchFacade switches;
global org.openremote.controller.statuscache.LevelFacade levels;
//import org.openremote.controller.protocol.;
//import org.openremote.controller.model.event.;
import java.util.;
import java.util.regex.;
``
error log:
ERROR 2017-11-24 20:58:22,949 (Drools): Error in executing rule : status licht living 1:Exception executing consequence for rule “Hue Bram via schakelaar” in org.openremote.controller.protocol: java.lang.NumberFormatException: For input string: “”
Event Switch Event (ID = 533307, Source = 'status licht living 1', Switch Value = 'on', Switch State = ON) not processed!
Exception executing consequence for rule “Hue Bram via schakelaar” in org.openremote.controller.protocol: java.lang.NumberFormatException: For input string: “”
at org.drools.core.runtime.rule.impl.DefaultConsequenceExceptionHandler.handleException(DefaultConsequenceExceptionHandler.java:39)
at org.drools.core.common.DefaultAgenda.fireActivation(DefaultAgenda.java:1100)
at org.drools.core.phreak.RuleExecutor.fire(RuleExecutor.java:121)
at org.drools.core.phreak.RuleExecutor.evaluateNetworkAndFire(RuleExecutor.java:74)
at org.drools.core.common.DefaultAgenda.fireNextItem(DefaultAgenda.java:1007)
at org.drools.core.common.DefaultAgenda.fireLoop(DefaultAgenda.java:1350)
at org.drools.core.common.DefaultAgenda.fireAllRules(DefaultAgenda.java:1288)
at org.drools.core.impl.StatefulKnowledgeSessionImpl.internalFireAllRules(StatefulKnowledgeSessionImpl.java:1306)
at org.drools.core.impl.StatefulKnowledgeSessionImpl.fireAllRules(StatefulKnowledgeSessionImpl.java:1297)
at org.drools.core.impl.StatefulKnowledgeSessionImpl.fireAllRules(StatefulKnowledgeSessionImpl.java:1278)
at org.openremote.controller.statuscache.rules.RuleEngine.push(RuleEngine.java:203)
at org.openremote.controller.statuscache.EventProcessorChain.push(EventProcessorChain.java:196)
at org.openremote.controller.statuscache.StatusCache.update(StatusCache.java:293)
at org.openremote.controller.model.sensor.Sensor.update(Sensor.java:367)
at org.openremote.controller.model.sensor.Sensor$DeviceReader.run(Sensor.java:655)
at java.lang.Thread.run(Thread.java:745)
Caused by: java.lang.NumberFormatException: For input string: “”
at java.lang.NumberFormatException.forInputString(NumberFormatException.java:65)
at java.lang.Integer.parseInt(Integer.java:592)
at java.lang.Integer.parseInt(Integer.java:615)
at org.openremote.controller.protocol.Rule_Hue_Bram_via_schakelaar2025263123.defaultConsequence(Rule_Hue_Bram_via_schakelaar2025263123.java:7)
at org.openremote.controller.protocol.Rule_Hue_Bram_via_schakelaar2025263123DefaultConsequenceInvokerGenerated.evaluate(Unknown Source)
at org.openremote.controller.protocol.Rule_Hue_Bram_via_schakelaar2025263123DefaultConsequenceInvoker.evaluate(Unknown Source)
at org.drools.core.common.DefaultAgenda.fireActivation(DefaultAgenda.java:1089)
... 14 more
ERROR 2017-11-24 20:58:22,952 (Drools): Root Cause:
java.lang.NumberFormatException: For input string: “”
at java.lang.NumberFormatException.forInputString(NumberFormatException.java:65)
at java.lang.Integer.parseInt(Integer.java:592)
at java.lang.Integer.parseInt(Integer.java:615)
at org.openremote.controller.protocol.Rule_Hue_Bram_via_schakelaar2025263123.defaultConsequence(Rule_Hue_Bram_via_schakelaar2025263123.java:7)
at org.openremote.controller.protocol.Rule_Hue_Bram_via_schakelaar2025263123DefaultConsequenceInvokerGenerated.evaluate(Unknown Source)
at org.openremote.controller.protocol.Rule_Hue_Bram_via_schakelaar2025263123DefaultConsequenceInvoker.evaluate(Unknown Source)
at org.drools.core.common.DefaultAgenda.fireActivation(DefaultAgenda.java:1089)
at org.drools.core.phreak.RuleExecutor.fire(RuleExecutor.java:121)
at org.drools.core.phreak.RuleExecutor.evaluateNetworkAndFire(RuleExecutor.java:74)
at org.drools.core.common.DefaultAgenda.fireNextItem(DefaultAgenda.java:1007)
at org.drools.core.common.DefaultAgenda.fireLoop(DefaultAgenda.java:1350)
at org.drools.core.common.DefaultAgenda.fireAllRules(DefaultAgenda.java:1288)
at org.drools.core.impl.StatefulKnowledgeSessionImpl.internalFireAllRules(StatefulKnowledgeSessionImpl.java:1306)
at org.drools.core.impl.StatefulKnowledgeSessionImpl.fireAllRules(StatefulKnowledgeSessionImpl.java:1297)
at org.drools.core.impl.StatefulKnowledgeSessionImpl.fireAllRules(StatefulKnowledgeSessionImpl.java:1278)
at org.openremote.controller.statuscache.rules.RuleEngine.push(RuleEngine.java:203)
at org.openremote.controller.statuscache.EventProcessorChain.push(EventProcessorChain.java:196)
at org.openremote.controller.statuscache.StatusCache.update(StatusCache.java:293)
at org.openremote.controller.model.sensor.Sensor.update(Sensor.java:367)
at org.openremote.controller.model.sensor.Sensor$DeviceReader.run(Sensor.java:655)
at java.lang.Thread.run(Thread.java:745)
``